My long list of gripes with my x55, the MIA StarCitizen HOTAS and the recent announcement of the Saitek x56:
Which according to Saitek is “Designed to meet the needs of the re-emerging space simulation genre” (hint: it’s actually a x55 with some blue paint and the joystick’s thumb button and the throttle’s mouse nub replaced with analog sticks) made it clear to me that there isn’t going to be a commercial HOTAS setup anytime soon that ticks all my boxes. So I’m making my own.
The x56 is a re-heated x55 that doesn’t really improve it, analog stick on the joystick’s thumb rest isn’t very usable, neither is the analog stick on the throttle near the lower front, your thumb doesn’t rest there naturally, only way to keep your thumb there is to basically let go of the throttle and only touch it with your finger tips in a weird claw grip. The split throttle and trim knobs are still pointless in space games, those features are only useful for games where you can control 2 engines separately and where you need to manually trim control surfaces, space games don’t have either of those things, it’s wasted space and added complexity.
What I want in a HOTAS:
Ergonomic
The x55 is legendarily uncomfortable unless you have hulk sized hands, the x52 was much better with it’s adjustable hand rest position on the stick and much more comfortable throttle layout, a custom design that is more compact and ergonomic with more controls within reach of your fingers without adjusting your grip (you can’t reach the pinky button and the lever that sticks out of the front and the hats on the top at the same time on the x55).
Customizable
This is a long-term project and I’m going to revise portions over time making it modular and come apart in screwed together pieces is key to this, if it’s printed in one solid lump each iteration would take a lot of time to print and use a lot of plastic.
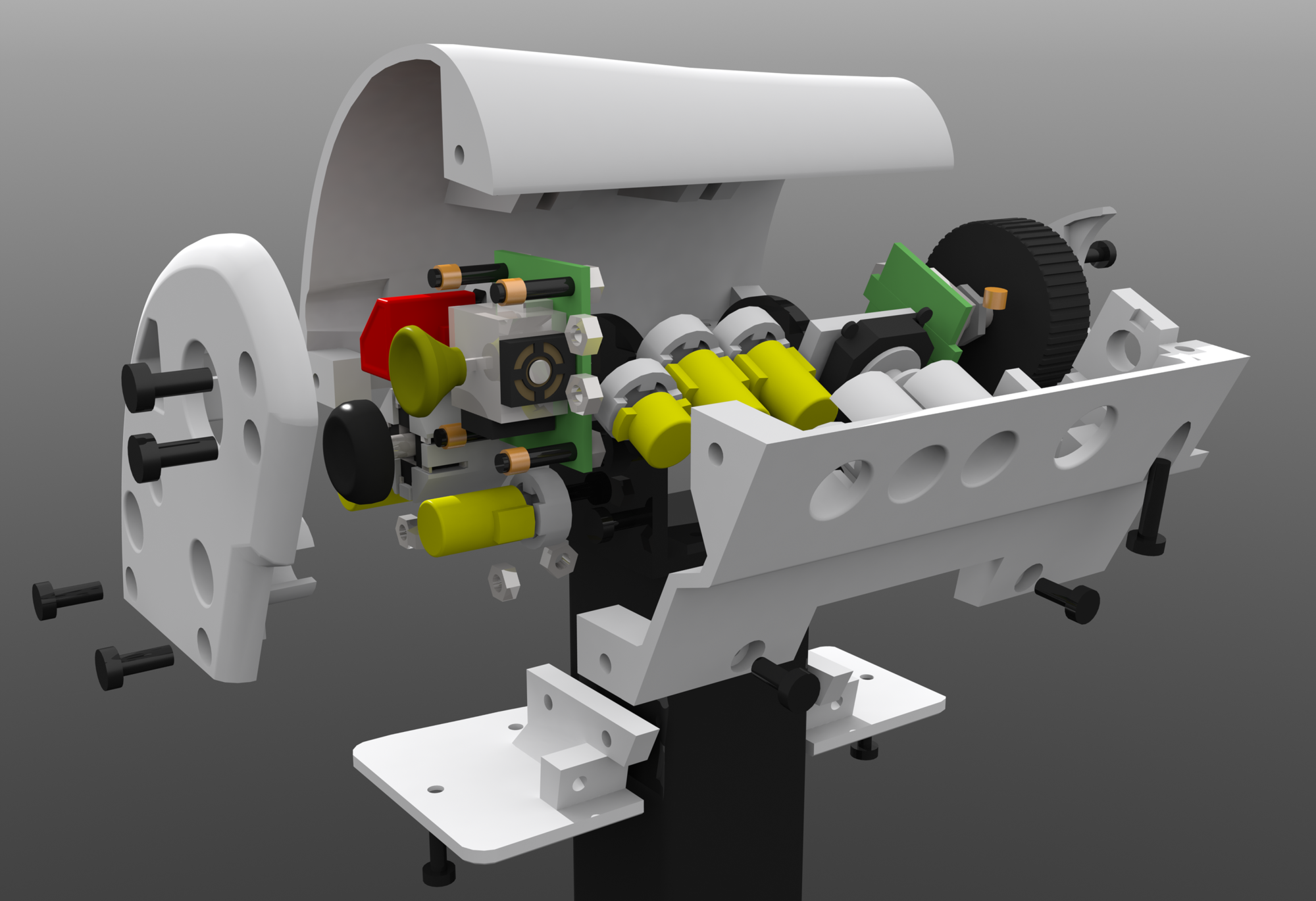
Main structural sections I’ve outlined so far:
- Trigger mount and trigger
- Top hat/button section
- Handle left and right halves including hand-rest
- Gimbal parts
- Base
Analog Axis that make sense for rotation and translation
Different people set up Joystick/HOTAS/Dual Joystick(+Pedals) to do different things in different games according to what makes sense to them, none of them seem optimal to me for use in a space game with 6dof controls.
Dual Stick (HOSAS)
A pretty weird (in my opinion) setup where you use 2 joysticks, the left joystick is used for translation (movement) and the right is used for rotation (as is the norm) This sounds great until you realize that the twist axis on the left stick doesn’t really have a natural fit, left/right to strafe left/right and up/down to strafe up/down or go forwards/back makes sense, but you can only use it for one of those, and the twist axis gets stuck with one axis of movement that doesn’t make a lot of sense, additionally which ever axis you use for forwards/back will self-center back to stationary if you let go of the stick, meaning you need a separate button to override the throttle axis and set it to full speed ahead while cruising, not very elegant and potentially tiring to fight the re-centering mechanism all the time during manual flight.
Main problem with dual stick is that there aren’t any nice ambidextrous or left handed joysticks, so you’re left with a pretty cheap and bad options and you have a lot less buttons available than a convetional HOTAS setup.
- Pros: symmetrical layout lets you re-use the same design for both inputs and keep both ergonomic.
- Cons: Axis doesn’t really make sense for translation.
HOTAS
A joystick in your right hand for rotation and a throttle in your left hand, the throttle doesn’t self-center meaning you can set it where you want it and leave it there which is nicer than a dual stick setup, downside is that no HOTAS throttle out there is designed with 6dof/space in mind, so they tend to only have an analog throttle axis with no additional analog axis for strafe up/down and strafe left/right the x56 “fixes” this by putting analog hat in a very uncomfortable spot, should be where your thumb naturally rests.
- Pros: Axis make sense, though usually translation is digital, a lot of buttons.
- Cons: Designed with airplanes in mind, lack 6dof relevant features like analog strafe.
HO(T/S)AM (Hands on throttle/stick and mouse)
A joystick/throttle in your left hand for translation and a mouse in your right for rotation/aim, become very popular recently with StarCitizen’s ongoing balancing problems with gimbals and mouse aim. Aiming with a mouse is superior technically speaking, but it’s a lot less immersive especially since you loose direct control of your ship’s direction due to the mouse controls making your ship follow your gun’s aim, also suffers from the same problems as dual stick with translation on left stick not making a lot of sense and the need for a lefty/ambi stick.
- Pros: Superior aim
- Cons: Lacking immersion, weird translation axis if using a stick.
Pedals
Honestly pedals don’t make sense to me in a fly by wire setup, the twist on a joystick handles yaw in a much more intuitive way than moving pedals and there isn’t really any use for a brake in space.
HOSSTAS (Hands on stick shaped throttle and stick)
My idea (not entirely original, there are a few other examples out there), I need to come up with a better name but it basically boils down to you hold 2 sticks, but the left stick has axis that make sense for translation. I’m pondering which of my 2 axis setups makes the most sense: A: Joystick shaped handle but instead of moving like a joystick it moves backwards/forwards (like some throttles) with some resistance and there is a bump in the middle of the motion, lets you go forwards and backwards with one axis and set it to stationary easily, translation done using an analog thumbstick on the end of the joystick shaped handle where your thumb naturally rests. B: Same exact design except the base of stick also moves left/right forwards/back for translation, problem with that setup is that I’m not sure it’s easy moving something in 2 axis that are that close, can you move the throttle axis backwards/forwards without also accidentally moving the stick’s angle that controls the up/down strafe as well? Probably pretty tiring to try and stop the handle rotating when also pushing on it, I’m leaning towards A. I much prefer the throttle being a linear sliding action instead of a rotating pivot point because it improves the ergonomics a lot.
- Pros: Allows both inputs to have symmetrical handles, reduces complexity of design and allows for optimal ergonomics. Axis makes sense for both rotation and translation.
- Cons: Can’t think of any.
A lot of buttons and switches
It’s nice having a lot of buttons and switches most space sims need a lot of them to properly control your craft without resorting to weird combos, using a slow to access UI or resorting to the keyboard or voice commands. But there needs to be a balance, too many buttons on the sticks makes it difficult to not accidentally push something and reduces the size of the buttons can have each. I think one analog thumb-stick per joystick and one or two digital hats each should suffice for the upper area, perhaps 1-2 additional buttons if I can come up with a layout that makes sense. I need to spend a lot of time considering how many buttons I need and where they fit probably will need multiple iterations and trial and error to arrive at a satisfying answer on the layout question.
Switches that are satisfying to use
The problem with current HOTAS setups is that they don’t use actual rocker/toggle switches/buttons, they’re momentary buttons dressed up as switches, the x5(5/6) has 7 metal levers coming out of the throttle that looks like switches, but all they do is toggle a button when pushed up/down, it’s not very satisfying since the switch doesn’t stay in place to indicate it’s state, making actual switches work is non-trivial though because constant on signals interfere with keybinding and can come out of sync with the game if the game only registers on/off events. I’ve thought on this for a long time and I think I’ve come up with an acceptable compromise: A rocker/locking switch that sends 2 different button pushes, one when activated and another when deactivated, this works very well for binds that cancel each other, but doesn’t really work for binds meant to toggle in of themselves, could send the same button push when toggled on and off but can come out of sync, would require some way to reset it if out of sync.
One big benefit of making the design modular and 3d printing it myself is that I can switch out elements to better suit different games input wise and cosmetically, can also make some buttons/switches a lot fancier than normal, like have a clear cage over the self destruct button that needs to be opened first, a ejection seat handle looking thing to eject etc. Can also label buttons/switches with what they actually do to eliminate the need for a printed keymap or similar. Can also make a custom “widget” for the power balance, could make it triangular etc.
One additional input type that most HOTAS setups is missing would be cool to add as well: incremental rotary encoders, my x55 has 2 knobs on it that for the most part are useless since they’re an analog axis, most things I’d like to use them for can’t use analog axis, instead a rotary encoder can just sent 2 different button pushes, one when you spin it one way, other the other way to let you step up/down, useful for adjusting things like radar range, power to certain systems etc
Unconventional layout
Benefit of making it myself is that I can do things that no commercial setup would, like integrating tablets/phones as interactive MFDs, putting controls in separate units placed away than the joystick and throttle base, my desk is in 2 layers, I’ve made a shelf my 3 monitors stand on, the front of that shelf is prime real-estate to put some separate controls on for less frequently accessed controls, buttons/switches don’t have to be confined to 2 rectangles holding the stick and throttle. Though the wiring might get a bit messy, can hide most of it under the shelf I think, probably need a powered USB hub to plug all this into to not take all the ports on my PC, will be a minimum of 3 plugs, joystick, throttle and misc control panels.
Mounts
Since I’m designing it myself I can integrate sensible mounts, main points are ease of use and how solid they are. My current thoughts are additional separate pieces that go on the underside of my desk that the movable bases drops into and locks. Main concerns here are to not make large visible holes in my desk or block my chair arms etc.